twr_spi
Driver for SPI bus. More...
Enumerations | |
| enum | twr_spi_speed_t { TWR_SPI_SPEED_125_KHZ = 0 , TWR_SPI_SPEED_250_KHZ = 1 , TWR_SPI_SPEED_500_KHZ = 2 , TWR_SPI_SPEED_1_MHZ = 3 , TWR_SPI_SPEED_2_MHZ = 4 , TWR_SPI_SPEED_4_MHZ = 5 , TWR_SPI_SPEED_8_MHZ = 6 , TWR_SPI_SPEED_16_MHZ = 7 } |
| SPI communication speed. More... | |
| enum | twr_spi_mode_t { TWR_SPI_MODE_0 = 0 , TWR_SPI_MODE_1 = 1 , TWR_SPI_MODE_2 = 2 , TWR_SPI_MODE_3 = 3 } |
| SPI mode of operation. More... | |
| enum | twr_spi_event_t { TWR_SPI_EVENT_DONE = 1 } |
| SPI event. More... | |
Functions | |
| void | twr_spi_init (twr_spi_speed_t speed, twr_spi_mode_t mode) |
| Initialize SPI channel. More... | |
| void | twr_spi_set_speed (twr_spi_speed_t speed) |
| Set SPI communication speed. More... | |
| void | twr_spi_set_timing (uint16_t cs_delay, uint16_t delay, uint16_t cs_quit) |
| Set SPI timing. More... | |
| twr_spi_speed_t | twr_spi_get_speed (void) |
| Get SPI communication speed. More... | |
| void | twr_spi_set_mode (twr_spi_mode_t mode) |
| Set SPI mode of operation. More... | |
| void | twr_spi_set_manual_cs_control (bool manual_cs_control) |
| Enable manual control of CS pin. More... | |
| twr_spi_mode_t | twr_spi_get_mode (void) |
| Get SPI mode of operation. More... | |
| bool | twr_spi_is_ready (void) |
| Check if is ready for transfer. More... | |
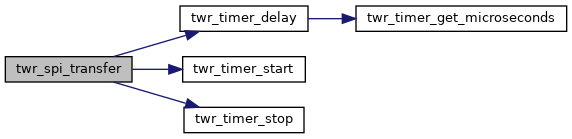
| bool | twr_spi_transfer (const void *source, void *destination, size_t length) |
| Execute SPI transfer. More... | |
| bool | twr_spi_async_transfer (const void *source, void *destination, size_t length, void(*event_handler)(twr_spi_event_t event, void *event_param), void(*event_param)) |
| Execute async SPI transfer. More... | |
Detailed Description
Driver for SPI bus.
Enumeration Type Documentation
◆ twr_spi_event_t
| enum twr_spi_event_t |
◆ twr_spi_mode_t
| enum twr_spi_mode_t |
◆ twr_spi_speed_t
| enum twr_spi_speed_t |
SPI communication speed.
Function Documentation
◆ twr_spi_async_transfer()
| bool twr_spi_async_transfer | ( | const void * | source, |
| void * | destination, | ||
| size_t | length, | ||
| void(*)(twr_spi_event_t event, void *event_param) | event_handler, | ||
| void * | event_param | ||
| ) |
Execute async SPI transfer.
- Parameters
-
[in] source Pointer to source buffer [out] destination Pointer to destination buffer [in] length Number of bytes to be transferred [in] event_handler Function address (can be NULL) [in] event_param Optional event parameter (can be NULL)
Definition at line 267 of file twr_spi.c.
Referenced by twr_ls013b7dh03_update().
Here is the call graph for this function:

Here is the caller graph for this function:

◆ twr_spi_get_mode()
| twr_spi_mode_t twr_spi_get_mode | ( | void | ) |
◆ twr_spi_get_speed()
| twr_spi_speed_t twr_spi_get_speed | ( | void | ) |
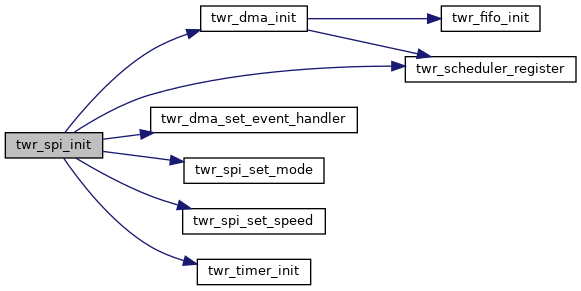
◆ twr_spi_init()
| void twr_spi_init | ( | twr_spi_speed_t | speed, |
| twr_spi_mode_t | mode | ||
| ) |
Initialize SPI channel.
- Parameters
-
[in] speed SPI communication speed [in] mode SPI mode of operation
Definition at line 64 of file twr_spi.c.
Referenced by twr_ls013b7dh03_init().
Here is the call graph for this function:
Here is the caller graph for this function:

◆ twr_spi_is_ready()
| bool twr_spi_is_ready | ( | void | ) |
Check if is ready for transfer.
- Returns
- true If ready
- false If not ready
Definition at line 187 of file twr_spi.c.
Referenced by twr_ls013b7dh03_is_ready(), and twr_ls013b7dh03_update().
Here is the caller graph for this function:

◆ twr_spi_set_manual_cs_control()
| void twr_spi_set_manual_cs_control | ( | bool | manual_cs_control | ) |
◆ twr_spi_set_mode()
| void twr_spi_set_mode | ( | twr_spi_mode_t | mode | ) |
Set SPI mode of operation.
- Parameters
-
[in] mode SPI mode of operation
Definition at line 155 of file twr_spi.c.
Referenced by twr_spi_init().
Here is the caller graph for this function:

◆ twr_spi_set_speed()
| void twr_spi_set_speed | ( | twr_spi_speed_t | speed | ) |
Set SPI communication speed.
- Parameters
-
[in] speed SPI communication speed
Definition at line 119 of file twr_spi.c.
Referenced by twr_spi_init().
Here is the caller graph for this function:

◆ twr_spi_set_timing()
| void twr_spi_set_timing | ( | uint16_t | cs_delay, |
| uint16_t | delay, | ||
| uint16_t | cs_quit | ||
| ) |
◆ twr_spi_transfer()
| bool twr_spi_transfer | ( | const void * | source, |
| void * | destination, | ||
| size_t | length | ||
| ) |