Driver for u-blox SAM-M8Q GPS/Galileo/Glonass navigation module. More...
Data Structures | |
| struct | twr_sam_m8q_driver_t |
| SAM-M8Q driver. More... | |
| struct | twr_sam_m8q_time_t |
| Time data structure. More... | |
| struct | twr_sam_m8q_position_t |
| Position data structure. More... | |
| struct | twr_sam_m8q_altitude_t |
| Altitude data structure. More... | |
| struct | twr_sam_m8q_quality_t |
| Quality data structure. More... | |
| struct | twr_sam_m8q_accuracy_t |
| Accuracy data structure. More... | |
Typedefs | |
| typedef struct twr_sam_m8q_t | twr_sam_m8q_t |
| SAM-M8Q instance. | |
Enumerations | |
| enum | twr_sam_m8q_event_t { TWR_SAM_M8Q_EVENT_ERROR = 0 , TWR_SAM_M8Q_EVENT_START = 1 , TWR_SAM_M8Q_EVENT_UPDATE = 2 , TWR_SAM_M8Q_EVENT_STOP = 3 } |
| Callback events. More... | |
Variables | |
| bool(* | twr_sam_m8q_driver_t::on )(twr_sam_m8q_t *self) |
| Callback for power on. | |
| bool(* | twr_sam_m8q_driver_t::off )(twr_sam_m8q_t *self) |
| Callback for power off. | |
| int | twr_sam_m8q_time_t::year |
| Year. | |
| int | twr_sam_m8q_time_t::month |
| Month. | |
| int | twr_sam_m8q_time_t::day |
| Day. | |
| int | twr_sam_m8q_time_t::hours |
| Hours. | |
| int | twr_sam_m8q_time_t::minutes |
| Minutes. | |
| int | twr_sam_m8q_time_t::seconds |
| Seconds. | |
| float | twr_sam_m8q_position_t::latitude |
| Latitude. | |
| float | twr_sam_m8q_position_t::longitude |
| Longitude. | |
| float | twr_sam_m8q_altitude_t::altitude |
| Altitude. | |
| char | twr_sam_m8q_altitude_t::units |
| Units of altitude. | |
| int | twr_sam_m8q_quality_t::fix_quality |
| Fix quality. | |
| int | twr_sam_m8q_quality_t::satellites_tracked |
| Number of satellites tracked. | |
| float | twr_sam_m8q_accuracy_t::horizontal |
| Horizontal accuracy estimate. | |
| float | twr_sam_m8q_accuracy_t::vertical |
| Vertical accuracy estimate. | |
Detailed Description
Driver for u-blox SAM-M8Q GPS/Galileo/Glonass navigation module.
Enumeration Type Documentation
◆ twr_sam_m8q_event_t
| enum twr_sam_m8q_event_t |
Callback events.
| Enumerator | |
|---|---|
| TWR_SAM_M8Q_EVENT_ERROR | Error event. |
| TWR_SAM_M8Q_EVENT_START | Start event. |
| TWR_SAM_M8Q_EVENT_UPDATE | Update event. |
| TWR_SAM_M8Q_EVENT_STOP | Stop event. |
Definition at line 13 of file twr_sam_m8q.h.
Function Documentation
◆ twr_sam_m8q_get_accuracy()
| bool twr_sam_m8q_get_accuracy | ( | twr_sam_m8q_t * | self, |
| twr_sam_m8q_accuracy_t * | accuracy | ||
| ) |
Get accuracy.
- Parameters
-
[in] self Instance [out] accuracy Accuracy data structure
- Returns
- true On success
- false On failure
Definition at line 124 of file twr_sam_m8q.c.
Referenced by twr_module_gps_get_accuracy().

◆ twr_sam_m8q_get_altitude()
| bool twr_sam_m8q_get_altitude | ( | twr_sam_m8q_t * | self, |
| twr_sam_m8q_altitude_t * | altitude | ||
| ) |
Get altitude.
- Parameters
-
[in] self Instance [out] altitude Altitude data structure
- Returns
- true On success
- false On failure
Definition at line 94 of file twr_sam_m8q.c.
Referenced by twr_module_gps_get_altitude().

◆ twr_sam_m8q_get_position()
| bool twr_sam_m8q_get_position | ( | twr_sam_m8q_t * | self, |
| twr_sam_m8q_position_t * | position | ||
| ) |
Get position.
- Parameters
-
[in] self Instance [out] position Position data structure
- Returns
- true On success
- false On failure
Definition at line 79 of file twr_sam_m8q.c.
Referenced by twr_module_gps_get_position().

◆ twr_sam_m8q_get_quality()
| bool twr_sam_m8q_get_quality | ( | twr_sam_m8q_t * | self, |
| twr_sam_m8q_quality_t * | quality | ||
| ) |
Get quality.
- Parameters
-
[in] self Instance [out] quality Quality data structure
- Returns
- true On success
- false On failure
Definition at line 109 of file twr_sam_m8q.c.
Referenced by twr_module_gps_get_quality().

◆ twr_sam_m8q_get_time()
| bool twr_sam_m8q_get_time | ( | twr_sam_m8q_t * | self, |
| twr_sam_m8q_time_t * | time | ||
| ) |
Get time.
- Parameters
-
[in] self Instance [out] time Time data structure
- Returns
- true On success
- false On failure
Definition at line 60 of file twr_sam_m8q.c.
Referenced by twr_module_gps_get_time().

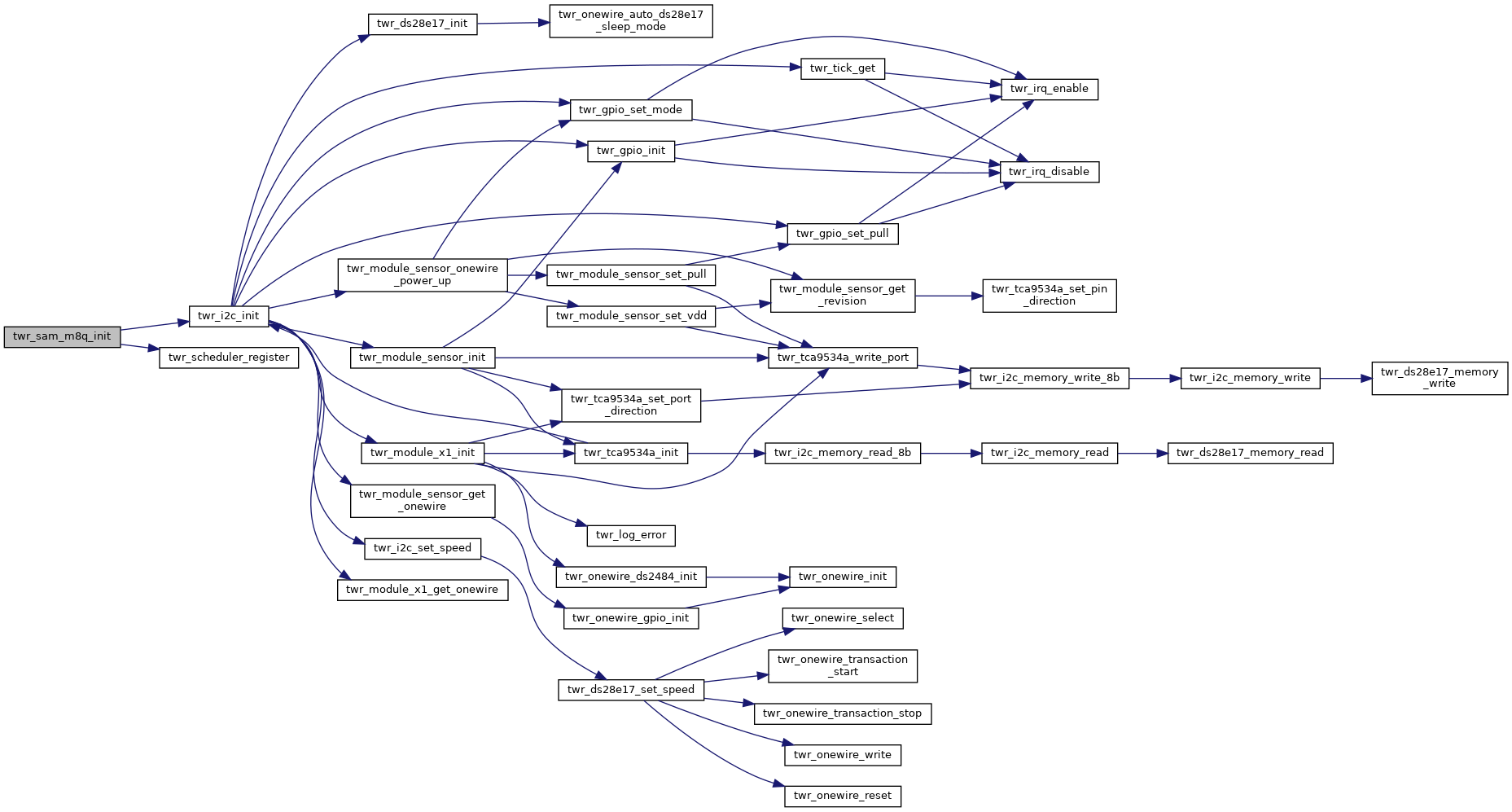
◆ twr_sam_m8q_init()
| void twr_sam_m8q_init | ( | twr_sam_m8q_t * | self, |
| twr_i2c_channel_t | channel, | ||
| uint8_t | i2c_address, | ||
| const twr_sam_m8q_driver_t * | driver | ||
| ) |
Initialize SAM-M8Q module driver.
- Parameters
-
[in] self Instance [in] i2c_channel I2C channel [in] i2c_address I2C device address [in] driver Optional driver (can be NULL)
Definition at line 13 of file twr_sam_m8q.c.
◆ twr_sam_m8q_set_event_handler()
| void twr_sam_m8q_set_event_handler | ( | twr_sam_m8q_t * | self, |
| twr_sam_m8q_event_handler_t | event_handler, | ||
| void * | event_param | ||
| ) |
Set callback function.
- Parameters
-
[in] self Instance [in] event_handler Function address [in] event_param Optional event parameter (can be NULL)
Definition at line 26 of file twr_sam_m8q.c.
◆ twr_sam_m8q_start()
| void twr_sam_m8q_start | ( | twr_sam_m8q_t * | self | ) |
Start navigation module.
- Parameters
-
[in] self Instance
Definition at line 32 of file twr_sam_m8q.c.
Referenced by twr_module_gps_start().


◆ twr_sam_m8q_stop()
| void twr_sam_m8q_stop | ( | twr_sam_m8q_t * | self | ) |
Stop navigation module.
- Parameters
-
[in] self Instance
Definition at line 43 of file twr_sam_m8q.c.
Referenced by twr_module_gps_stop().

