twr_hc_sr04
Driver for HC-SR04 ultrasonic range sensor. More...
Typedefs | |
| typedef struct twr_hc_sr04_t | twr_hc_sr04_t |
| HC-SR04 instance. | |
Enumerations | |
| enum | twr_hc_sr04_event_t { TWR_HC_SR04_EVENT_ERROR = 0 , TWR_HC_SR04_EVENT_UPDATE = 1 } |
| enum | twr_hc_sr04_echo_t { TWR_HC_SR04_ECHO_P5 = TWR_GPIO_P5 , TWR_HC_SR04_ECHO_P8 = TWR_GPIO_P8 } |
Functions | |
| void | twr_hc_sr04_init_sensor_module (twr_hc_sr04_t *self) |
| Initialize HC-SR04 for sensor module. More... | |
| void | twr_hc_sr04_init (twr_hc_sr04_t *self, twr_gpio_channel_t trig, twr_hc_sr04_echo_t echo) |
| Initialize HC-SR04. More... | |
| void | twr_hc_sr04_set_event_handler (twr_hc_sr04_t *self, void(*event_handler)(twr_hc_sr04_t *, twr_hc_sr04_event_t, void *), void *event_param) |
| Set callback function. More... | |
| void | twr_hc_sr04_set_update_interval (twr_hc_sr04_t *self, twr_tick_t interval) |
| Set measurement interval. More... | |
| bool | twr_hc_sr04_measure (twr_hc_sr04_t *self) |
| Start measurement manually. More... | |
| bool | twr_hc_sr04_get_distance_millimeter (twr_hc_sr04_t *self, float *millimeter) |
| Get measured distance in millimeters. More... | |
Detailed Description
Driver for HC-SR04 ultrasonic range sensor.
Enumeration Type Documentation
◆ twr_hc_sr04_event_t
| enum twr_hc_sr04_event_t |
| Enumerator | |
|---|---|
| TWR_HC_SR04_EVENT_ERROR | Error event. |
| TWR_HC_SR04_EVENT_UPDATE | Update event. |
Definition at line 12 of file twr_hc_sr04.h.
Function Documentation
◆ twr_hc_sr04_get_distance_millimeter()
| bool twr_hc_sr04_get_distance_millimeter | ( | twr_hc_sr04_t * | self, |
| float * | millimeter | ||
| ) |
Get measured distance in millimeters.
- Parameters
-
[in] self Instance [out] millimeter Pointer to variable where result will be stored
- Returns
- true When value is valid
- false When value is invalid
Definition at line 190 of file twr_hc_sr04.c.
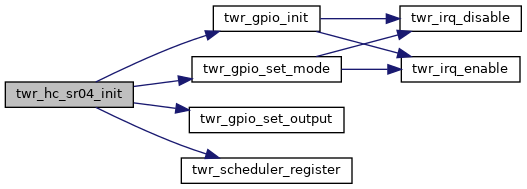
◆ twr_hc_sr04_init()
| void twr_hc_sr04_init | ( | twr_hc_sr04_t * | self, |
| twr_gpio_channel_t | trig, | ||
| twr_hc_sr04_echo_t | echo | ||
| ) |
Initialize HC-SR04.
- Parameters
-
[in] self Instance [in] echo Pin [in] trig Pin
Definition at line 19 of file twr_hc_sr04.c.
Referenced by twr_hc_sr04_init_sensor_module().
Here is the call graph for this function:
Here is the caller graph for this function:

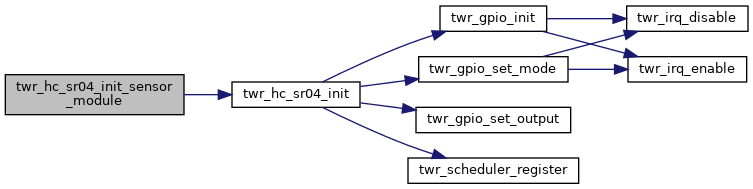
◆ twr_hc_sr04_init_sensor_module()
| void twr_hc_sr04_init_sensor_module | ( | twr_hc_sr04_t * | self | ) |
Initialize HC-SR04 for sensor module.
- Parameters
-
[in] self Instance
Definition at line 14 of file twr_hc_sr04.c.
Here is the call graph for this function:
◆ twr_hc_sr04_measure()
| bool twr_hc_sr04_measure | ( | twr_hc_sr04_t * | self | ) |
Start measurement manually.
- Parameters
-
[in] self Instance
- Returns
- true On success
- false When other measurement is in progress
Definition at line 114 of file twr_hc_sr04.c.
Referenced by twr_hc_sr04_set_update_interval().
Here is the call graph for this function:

Here is the caller graph for this function:

◆ twr_hc_sr04_set_event_handler()
| void twr_hc_sr04_set_event_handler | ( | twr_hc_sr04_t * | self, |
| void(*)(twr_hc_sr04_t *, twr_hc_sr04_event_t, void *) | event_handler, | ||
| void * | event_param | ||
| ) |
Set callback function.
- Parameters
-
[in] self Instance [in] event_handler Function address [in] event_param Optional event parameter (can be NULL)
Definition at line 92 of file twr_hc_sr04.c.
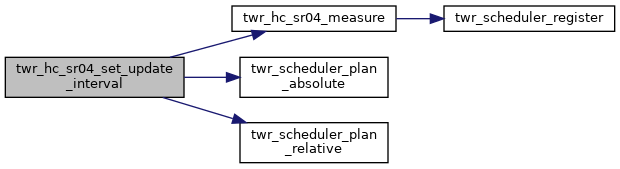
◆ twr_hc_sr04_set_update_interval()
| void twr_hc_sr04_set_update_interval | ( | twr_hc_sr04_t * | self, |
| twr_tick_t | interval | ||
| ) |
Set measurement interval.
- Parameters
-
[in] self Instance [in] interval Measurement interval
Definition at line 98 of file twr_hc_sr04.c.
Here is the call graph for this function: